헵 규칙 (Hebb rule) 은 최초의 신경망 학습 규칙 중 하나로, 1949년 도널드 헵 (Donald O. Hebb) 이 뇌의 시냅스 변형 메커니즘으로 제안한 이후로 인공 신경망 훈련에 사용되고 있다.
당시 헵이 집필한 'The Organization of Behavior' 책에는 헵 학습으로 알려진 가정 (공리) 이 있다.
세포 A의 축삭이 세포 B를 자극하기에 충분히 가깝고 B를 발화하는 데 반복적 또는 지속적으로 참여할 때, 한쪽 또는 양쪽 세포에 일종의 성장 과정이나 신진대사의 변화가 일어남으로써 B를 발화하는 세포 중 하나로서 A의 효율이 올라간다.
헵 학습 규칙은 다양한 신경망 구조와 결합해서 사용할 수 있다. 예를 들어 선형 연상 메모리 (linear associator) 가 있다.
이는 연상 메모리 (associative memory) 라고 하는 신경망 종류의 한 예로, 연상 메모리의 작업은 프로토타입 입력/출력 벡터의 Q개 쌍을 학습하는 것이다.
$$ \{p_1,t_1\}, \{p_2,t_2\}, ... , \{p_Q,t_Q\} $$
네트워크가 입력 p를 받으면 출력 t를 생성해야 하는데, 입력이 바뀌면 출력도 약간 바뀌어야 한다.
시냅스 양쪽에 있는 두 뉴런이 동시에 활성화되면 시냅스의 강도는 증가하게 될 것이다.
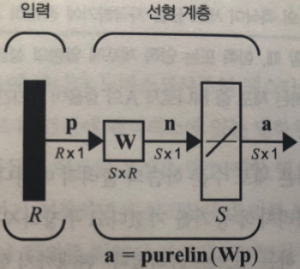
- 위 그림에서 입력 p와 출력 a의 연결 (시냅스) 은 가중치 w이다.
헵의 가정은 양의 p가 양의 a를 생성한다면 w가 증가해야 한다는 것을 의미한다. 수학적 해석은 아래와 같다.

- p는 q번째 입력 벡터의 j번째 요소
- a는 q번째 입력 벡터가 네트워크에 제시될 때 네트워크 출력의 i번째 요소
- 알파는 양의 상수이며, 학습률 (learning rate) 이라고 부름
이 식은 가중치 w의 변화가 시냅스 양쪽의 활성 함수의 곱에 비례한다는 사실을 말해준다.
참고로 이 식에 정의된 헵 규칙은 비지도 학습 (unsupervised learning) 규칙이므로, 목표 출력에 관련된 정보가 필요 없다. 지도 (supervised) 헵 규칙에서는 실제 출력을 목표 출력으로 대체할 수 있다.

이 방법은 알고리즘에게 '네트워크가 현재 하고 있는 것'이 아닌 '네트워크가 해야만 하는 것'을 알려준다.
- t는 q번째 목표 벡터 t의 i번째 요소
- 학습률은 1로 설정
벡터 표기법은 아래와 같다.
$$ W^N=W^O+t_qp_q^T $$
가중치 행렬을 0으로 초기화하고 Q개의 입력/출력 쌍을 한번에 적용하면 아래와 같이 작성할 수 있다.
$$ W=t_1p_1^T+t_2p_2^T+ ... +t_QP_Q^T=\sum_{q=1}^{Q}t_qp_q^T $$
이 식은 행렬 방식으로 표현될 수 있다.
$$ W=\begin{bmatrix}
t_1 & t_2 & ... & t_Q \\
\end{bmatrix}\begin{bmatrix}
p_1^T \\ p_2^T \\ ... \\ p_Q^T
\end{bmatrix}=TP^T $$
여기서
$$ T=\begin{bmatrix}
t_1 & t_2 & ... & t_Q \\
\end{bmatrix}, P=\begin{bmatrix}
p_1 & p_2 & ... & p_Q \\
\end{bmatrix} $$
선형 연상 메모리에 대한 헵 학습의 성능 분석 시 프로토타입 벡터 (p_q) 가 직교하면서 단위 길이를 갖는 정규직교 (orthonormal) 인 경우와 단위 길이를 갖지만 직교하지 않는 경우를 나눠서 살펴볼 수 있다.
- 정규직교인 경우:
p_k 가 네트워크 입력이면 네트워크 출력은 다음과 같이 계산된다.
$$ a=Wp_k=(\sum_{q=1}^{Q}t_qp_q^T)p_k=\sum_{q=1}^{Q}t_q(p_q^Tp_k) $$
p_q 가 정규직교이기 때문에 다음과 같이 된다.
$$ (p_q^Tp_k)=1, q=k $$
$$ (p_q^Tp_k)=0, q!=k $$
Identity matrix 가 되기 때문에 네트워크 출력은 다음과 같이 간단하게 작성될 수 있다.
$$ a=Wp_k=t_k $$ - 단위 길이이지만, 직교가 아닌 경우:
벡터가 직교하지 않기 때문에 네트워크는 정확한 출력을 생성하지 않을 것이며, 오차의 크기는 프로토타입 입력 패턴 사이에 상관 관계의 크기에 따라 달라진다.
$$ a=Wp_k=t_k+\sum_{q!=k}^{}t_q(p_q^Tp_k) $$
우항의 시그마는 오차를 나타낸다.
예제 1) 입력 벡터가 정규직교일 때
$$ p_1=\begin{bmatrix}
0.5 \\ -0.5 \\ 0.5 \\ -0.5
\end{bmatrix}, t_1=\begin{bmatrix}
1 \\ -1
\end{bmatrix} $$
$$ p_2=\begin{bmatrix}
0.5 \\ 0.5 \\ -0.5 \\ -0.5
\end{bmatrix}, t_2=\begin{bmatrix}
1 \\ 1
\end{bmatrix} $$
가중치 행렬:
$$ W=TP^T=\begin{bmatrix}
1 & 1 \\
-1 & 1 \\
\end{bmatrix}\begin{bmatrix}
0.5 & -0.5 & 0.5 & -0.5 \\
0.5 & 0.5 & -0.5 & -0.5 \\
\end{bmatrix}=\begin{bmatrix}
1 & 0 & 0 & -1 \\
0 & 1 & -1 & 0 \\
\end{bmatrix} $$
각각의 프로토타입 입력에 대한 가중치 행렬 테스트 결과:
$$ Wp_1=\begin{bmatrix}
1 & 0 & 0 & -1 \\
0 & 1 & -1 & 0 \\
\end{bmatrix}\begin{bmatrix}
0.5 \\ -0.5 \\ 0.5 \\ -0.5 \\
\end{bmatrix} =\begin{bmatrix}
1 \\ -1
\end{bmatrix} $$
$$ Wp_2=\begin{bmatrix}
1 & 0 & 0 & -1 \\
0 & 1 & -1 & 0 \\
\end{bmatrix}\begin{bmatrix}
0.5 \\ 0.5 \\ -0.5 \\ -0.5 \\
\end{bmatrix}=\begin{bmatrix}
1 \\ 1
\end{bmatrix} $$
네트워크 출력이 목표와 동일하다는 것을 알 수 있다.
예제 2) 입력 벡터가 직교하지 않을 때
$$ p_1=\begin{bmatrix}
1 \\ -1 \\ -1
\end{bmatrix},
p_2=\begin{bmatrix}
1 \\ 1 \\ -1
\end{bmatrix} $$
두 프로토타입 입력을 정규화하고 희망 출력을 -1과 1로 각각 선택하면 다음과 같다.
$$ p_1=\begin{bmatrix}
0.5774 \\ -0.5774 \\ -0.5774
\end{bmatrix}, t_1=\begin{bmatrix}
-1
\end{bmatrix} $$
$$ p_2=\begin{bmatrix}
0.5774 \\ 0.5774 \\ -0.5774
\end{bmatrix}, t_2=\begin{bmatrix}
1
\end{bmatrix} $$
가중치 행렬:
$$ W=TP^T=\begin{bmatrix}
-1 & 1
\end{bmatrix}\begin{bmatrix}
0.5774 & -0.5774 & -0.5774 \\
0.5774 & 0.5774 & -0.5774 \\
\end{bmatrix}=\begin{bmatrix}
1 & 1.1548 & 0
\end{bmatrix} $$
두 프로토타입 패턴을 가중치 행렬과 곱하면 다음과 같다.
$$ Wp_1=\begin{bmatrix}
0 & 1.1548 & 0
\end{bmatrix}\begin{bmatrix}
0.5774 \\ -0.5774 \\ -0.5774
\end{bmatrix} =\begin{bmatrix}
-0.6668
\end{bmatrix} $$
$$ Wp_2=\begin{bmatrix}
0 & 1.1548 & 0
\end{bmatrix}\begin{bmatrix}
0.5774 \\ 0.5774 \\ -0.5774
\end{bmatrix} =\begin{bmatrix}
0.6668
\end{bmatrix} $$
출력이 목표 출력과 일치하지 않는다.
'ArtificialIntelligence > NeuralNetworkDesign' 카테고리의 다른 글
| Key terms in deep neural networks (0) | 2023.11.07 |
|---|---|
| Learning Rule (0) | 2023.10.24 |
| Neuron Network Model (0) | 2023.07.13 |