### 3. Use scipy.ndimage.uniform_filter1d
from scipy.ndimage.filters import uniform_filter1d
averages = uniform_filter1d(values, size=3)
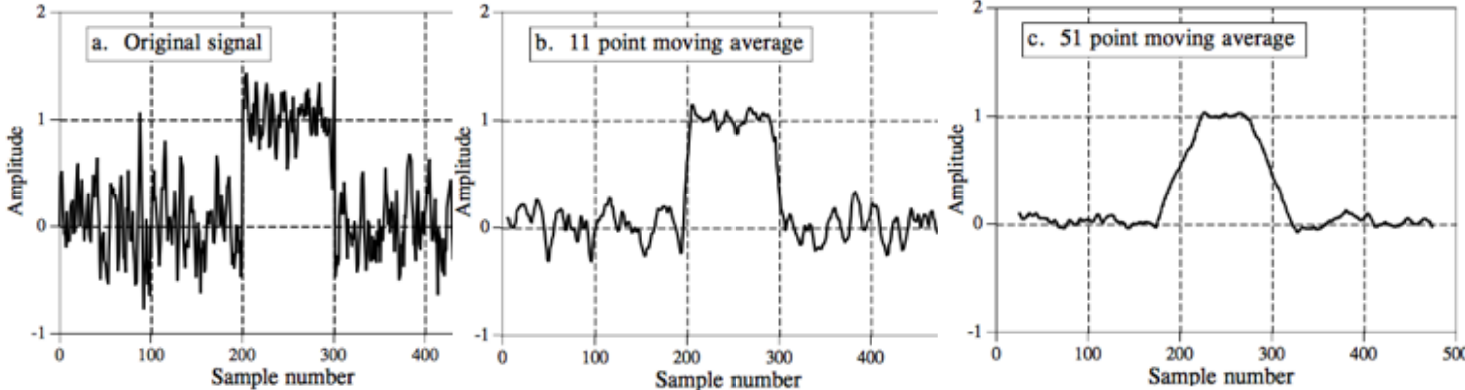
Averaging low-pass filter
In signal processing, the moving average filter can be used as a simple low-pass filter. The moving average filter smooths out a signal, removing the high frequency components from it, and this is what a low-filter does!
FIR (Finite Impulse Response) filers
In signal processing, a FIR filer is a filter whose impulse response (or response to any finite length input) is of finite duration, because it settles to zero in finite time. For a general N-tap FIR filter, the nth output is:
$$ y(n)=\sum_{k=0}^{N-1}h(k)x(n-k) $$
$$ h(n)=\frac{1}{N} $$
$$ n=0,1,...,N $$
This fomula has already been used above, since the moving average filter is a kind of FIR filter.
Implementing in Python:
import numpy as np
from thinkdsp import SquareSignal, Wave
# suppress scientific notation for small numbers
np.set_printoptions(precision=3, suppress=True)
# The wave to be filtered
from thinkdsp import read_wave
my_sound = read_wave('../Audio/429671__violinsimma__violin-carnatic-phrase-am.wav')
my_sound.make_audio()
# Make a 5-tap FIR filter using the following coefficients: 0.1, 0.2, 0.2, 0.2, 0.1
window = np.array([0.1, 0.2, 0.2, 0.2, 0.1])
# Apply the window to the signal using np.convolve
filtered = np.convolve(my_sound.ys, window, mode='same')
filtered_violin = Wave(filtered, framerate=my_sound.framerate)
filtered_violin.make_audio()
LTI (Linear Time Invariant) systems
It it happens to be a LTI system, we can represent its behaviour as a list of numbers known as an IMPULSE RESPONSE.
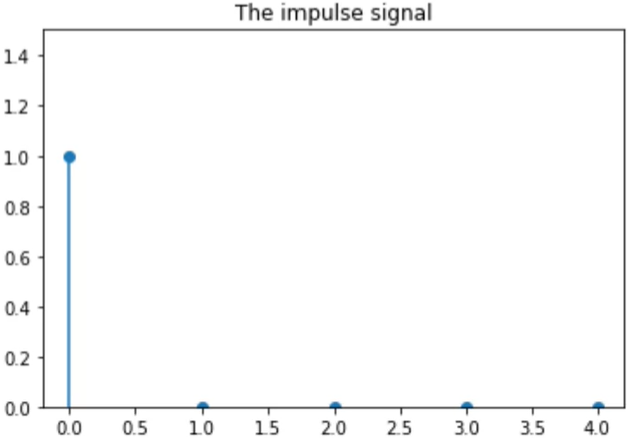
An impulse response is the response of an LTI system to the impulse signal.
An impulse is one single maximum amplitude sample.
Example of an impulse:
There is one stalk that is reaching up to 0.
Example of an impulse response:
It is a bunch of stalks (a set of numbers).
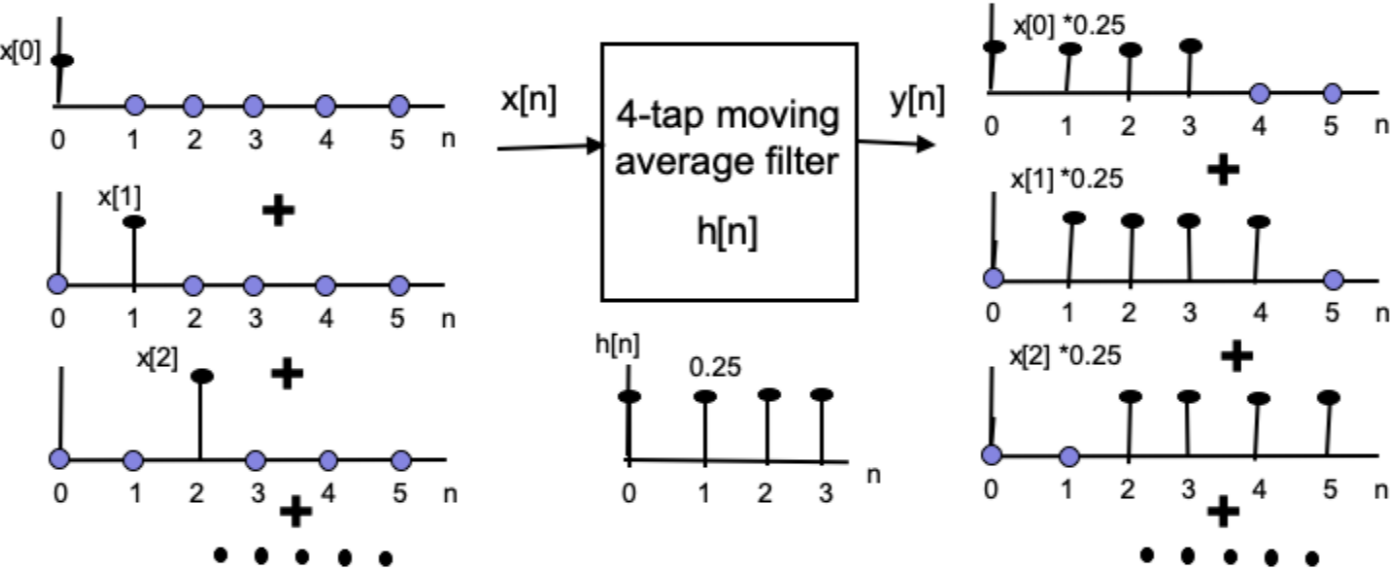
Given an impulse response, we can easily process any signal with that system using convolution.
We can derive the output of a discrete linear system, by adding together the system's response to each input sample separately. This operation is known as convolution.
※ Theconvolutionoperator is indicated by the '*' operator
Three characteristics of LTI systems
Linear systems have very specific characteristics which enable us to do the convolution:
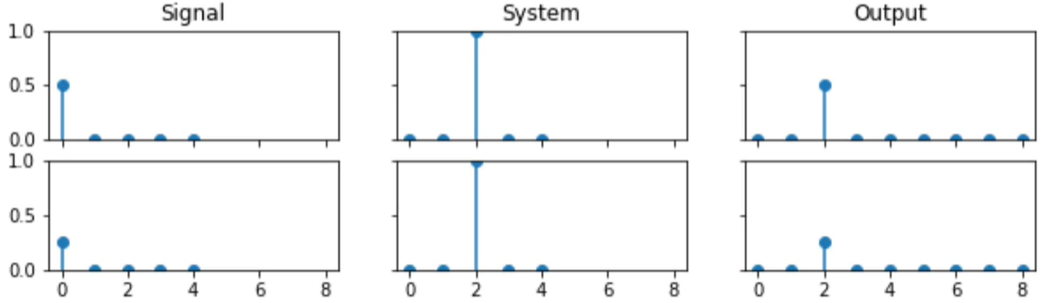
Homogeneity (or linear with respect to scale)
: Multiply the signal by 0.5 (scale it by 0.5), shove both the signals through the systemsl, and get the outputs 1) Convolve the signal with the system 2) Receive the output → It doesn't matter if the signal is scaled becuse we know tht it will produce the same scaled output.
Additivity (decompose)
: Separately process simple signals and add results together
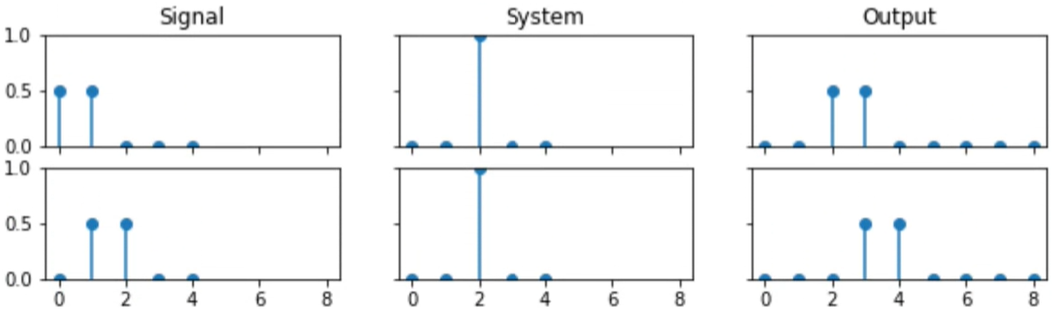
Shift invariance
: Shift a signal across (e.g. delay by one unit)
Implement an impulse response by hand:
Signal = [1.0, 0.75, 0.5, 0.75, 1.0]
System = [0.0, 1.0, 0.75, 0.5, 0.25]
Decompose:
input = [0.0, 0.0, 0.0, 0.0, 0.0]
input = [0.0, 1.0, 0.0, 0.0, 0.0]
input = [0.0, 0.0, 0.75, 0.0, 0.0]
input = [0.0, 0.0, 0.0, 0.5, 0.0]
input = [0.0, 0.0, 0.0, 0.0, 0.25]
Scale:
output = [0.0, 0.0, 0.0, 0.0, 0.0]
output = [1.0, 0.75, 0.5, 0.75, 1.0]
output = [0.75, 0.5625, 0.375, 0.5625, 0.75]
output = [0.5, 0.375, 0.25, 0.375, 0.5]
output = [0.25, 0.1875, 0.125, 0.1875, 0.25]
Shift:
output = [0.0, 0.0, 0.0, 0.0, 0.0]
output = [0.0, 1.0, 0.75, 0.5, 0.75, 1.0] // delay by one unit
output = [0.0, 0.0, 0.75, 0.5625, 0.375, 0.5625, 0.75] // delay by two units
output = [0.0, 0.0, 0.0, 0.5, 0.375, 0.25, 0.375, 0.5] // delay by three units
output = [0.0, 0.0, 0.0, 0.0, 0.25, 0.1875, 0.125, 0.1875, 0.25] // delay by four units